

Stepbot
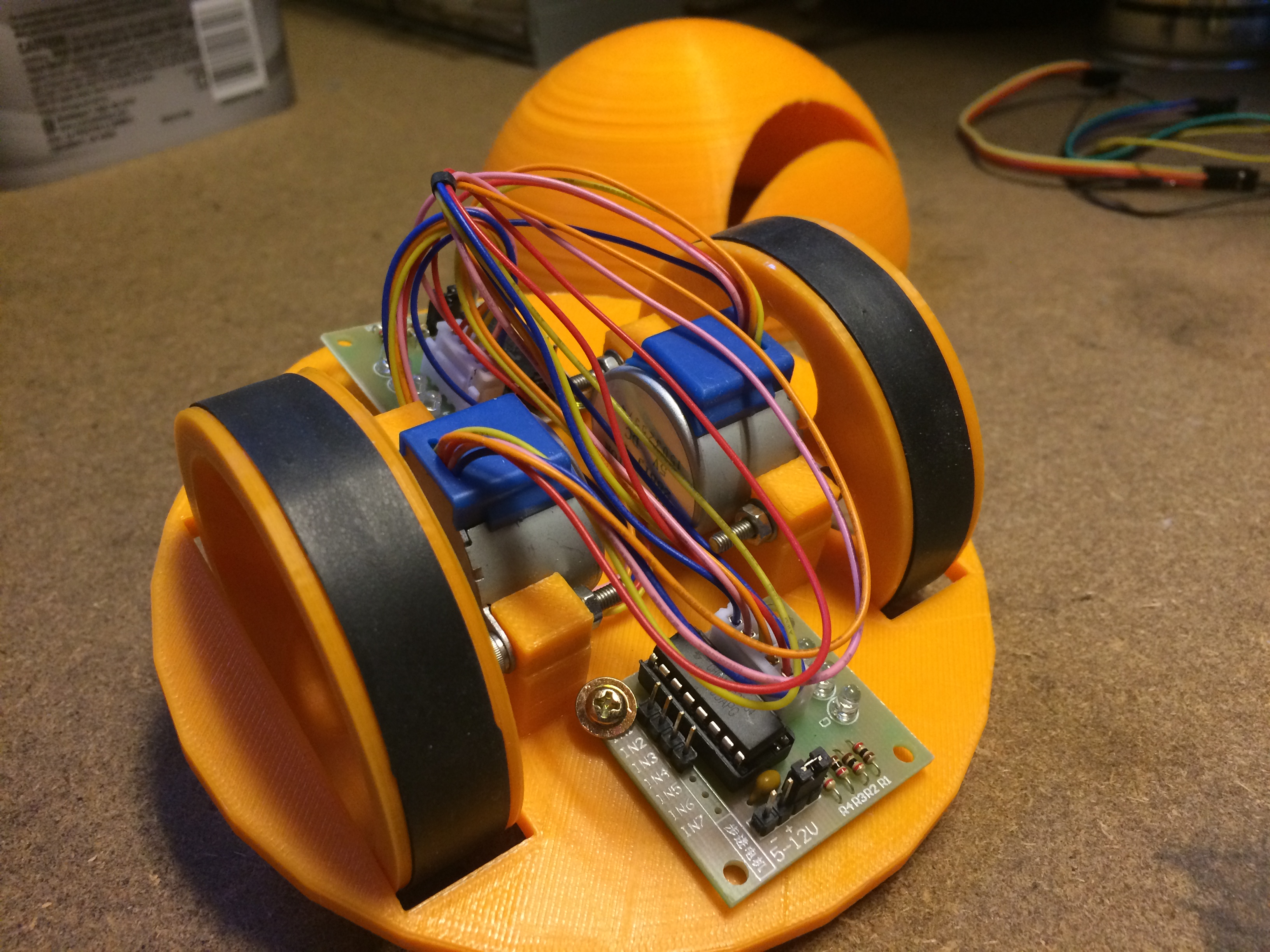 Stepbot is designed to be a simple, general-purpouse robot platform designed around inexpensive unipolar stepper motors. The design was inspired by the “turtle” robots that were used used in conjunction with the LOGO language to teach programming in the 1980’s.
Stepbot is designed to be a simple, general-purpouse robot platform designed around inexpensive unipolar stepper motors. The design was inspired by the “turtle” robots that were used used in conjunction with the LOGO language to teach programming in the 1980’s.  I had forgotten about this project until about a week ago when I was organizing the lab and came across a box labeled “chalkbot” (the first application I had in mind was to attach a piece of chalk to the chassis and make it draw things on the sidewalk). Based on the Github repository, I started this project about two years ago. Originally, I intended to use an Atmega328p breakout board as the brains of the operation, and develop the firmware using the Arduino IDE. The rest of the electronics consisted of the stepper motor drivers that came with the motors (based on the ULN2003APG IC ) and a battery power supply. Revisiting the project now I think something more sophisticated like a Linux-based SBC might make the robot more useful, both in terms of expanding the potential applications and making development more approachable via a wider range of tools, languages, etc. Personally, I’m interested in exploring the idea of using the design to produce an inexpensive telepresense robot, perhaps something capable of interfacing with runmyrobot.com. In any event I’ve decided to revive the project and work on giving it a new brain. At the moment I’m planning to experiment with driving the motors using a Raspberry Pi (because that’s the platform of choice for runmyrobot). But, given the size of a standard Raspberry Pi (and the cost of getting a properly-outfitted Raspberry Pi Zero), I’m probably going to choose something else in the long run, perhaps Next Thing Co.’s CHIP, or some other Open Source Hardware ARM-based Linux SBC. Regardless of the final choice, it needs to be small, low-power and obtainable.
I had forgotten about this project until about a week ago when I was organizing the lab and came across a box labeled “chalkbot” (the first application I had in mind was to attach a piece of chalk to the chassis and make it draw things on the sidewalk). Based on the Github repository, I started this project about two years ago. Originally, I intended to use an Atmega328p breakout board as the brains of the operation, and develop the firmware using the Arduino IDE. The rest of the electronics consisted of the stepper motor drivers that came with the motors (based on the ULN2003APG IC ) and a battery power supply. Revisiting the project now I think something more sophisticated like a Linux-based SBC might make the robot more useful, both in terms of expanding the potential applications and making development more approachable via a wider range of tools, languages, etc. Personally, I’m interested in exploring the idea of using the design to produce an inexpensive telepresense robot, perhaps something capable of interfacing with runmyrobot.com. In any event I’ve decided to revive the project and work on giving it a new brain. At the moment I’m planning to experiment with driving the motors using a Raspberry Pi (because that’s the platform of choice for runmyrobot). But, given the size of a standard Raspberry Pi (and the cost of getting a properly-outfitted Raspberry Pi Zero), I’m probably going to choose something else in the long run, perhaps Next Thing Co.’s CHIP, or some other Open Source Hardware ARM-based Linux SBC. Regardless of the final choice, it needs to be small, low-power and obtainable.